Follow Us





Robot Yazılımlar
-
25. 04. 02
- posted by: Super User
-
Gösterim: 571
FRC 8084 Alfa Robotics
İleriye doğru her adımda robot teknolojileri
Hoşgeldiniz!
Alfa Robotics 8084 FRC Takımına hoşgeldiniz. Robotik projelerimizi, başarılarımızı ve etkinliklerimizi buradan takip edebilirsiniz.
Hakkımızda
Alfa Robotics 8084, genç mühendislerin teknoloji dünyasında liderlik etmelerini sağlamak için bir araya gelmiş bir robotik takımındır. Eğitim ve inovasyon ile geleceği şekillendiriyoruz.
Galeri




İletişim
Bizimle iletişime geçmek için aşağıdaki formu doldurun:
-
24. 12. 06
- posted by: Super User
-
Gösterim: 1486
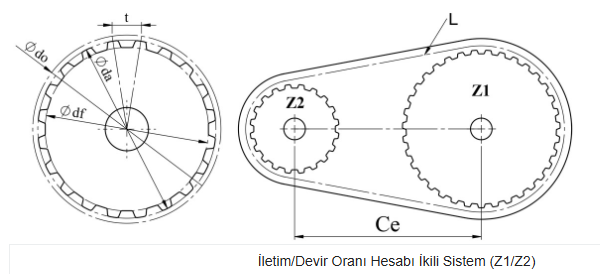
Triger Kayış ve Kasnak Hesabı
Kayış Seçimi
Sonuçlar
Kayış Adımı: - mm
Büyük Kasnak Çapı: - mm
Küçük Kasnak Çapı: - mm
Tahmini Kayış Uzunluğu: - mm
-
24. 12. 06
- posted by: Super User
-
Gösterim: 1335

| Özellik | Değer |
|---|
| Özellik | Değer |
|---|
| Özellik | Değer |
|---|
-
24. 12. 06
- posted by: Super User
-
Gösterim: 1195

Triger Kayış ve Kasnak Hesabı
Kayış Seçimi
Sonuçlar
Kayış Adımı: - mm
Büyük Kasnak Çapı: - mm
Küçük Kasnak Çapı: - mm
Tahmini Kayış Uzunluğu: - mm
-
23. 12. 07
- posted by: Super User
-
Gösterim: 2649
azılım Bileşenine Genel Bakış
FRC ® yazılım, çok çeşitli zorunlu ve isteğe bağlı bileşenlerden oluşur. Bu öğeler, robot kodunuzun tasarımı, geliştirilmesi ve hata ayıklamasında size yardımcı olmanın yanı sıra kontrol robotunun çalışmasına yardımcı olmak ve sorun giderme sırasında geri bildirim sağlamak için tasarlanmıştır. Bu belge, her bir yazılım bileşeni için, amacına ilişkin kısa bir genel bakış, uygunsa paket indirme bağlantısı ve varsa diğer belgelere bağlantı sağlar.
İşletim Sistemi Uyumluluğu
FRC bileşenleri için desteklenen birincil işletim sistemi Windows’tur. Tüm gerekli FRC yazılım bileşenleri Windows 10 & 11 ‘de test edilmiştir.
C ++/ Java programlama araçlarının çoğu, macOS ve Linux’ta da desteklenmekte ve test edilmektedir. C ++ / Java’da programlama ekipleri, Driver Station, Radio Configuration Utility ve roboRIO Imaging Tool gibi yalnızca Windows’a yönelik uygulamalar için yalnızca Windows sistemi kullanarak çalıştırmalıdır.
LabVIEW FRC (Yalnızca Windows)
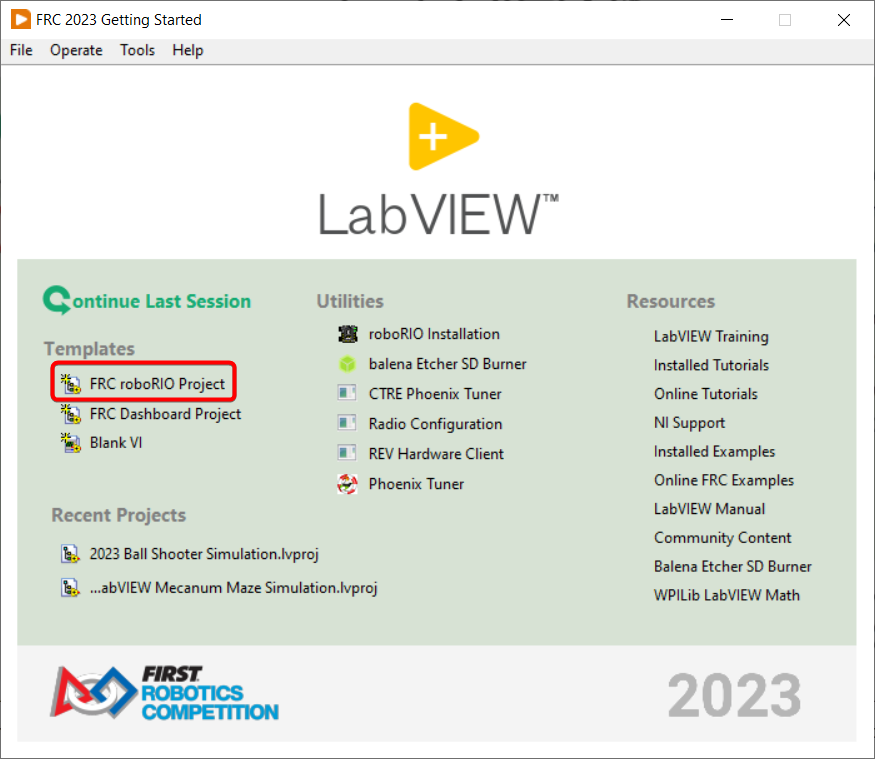
LabVIEW Professional’ın son sürümüne dayanan LabVIEW FRC, bir FRC robotu programlamak için resmi olarak desteklenen üç dilden biridir. LabVIEW grafiksel, veri akışı odaklı bir dildir. LabVIEW programları, VI’lar arasında veri ileten kablolarla birlikte bağlanan ve VI adı verilen bir simgeler koleksiyonundan oluşur. LabVIEW FRC yükleyici, Kickoff Parça Kitinde bulunan bir DVD’de dağıtılır ve ayrıca indirilebilir. Kurulum talimatları dahil olmak üzere LabVIEW FRC yazılımına başlama kılavuzu bulunabilir here.
Visual Studio Kodu
Visual Studio Code, C ++ ve Java (desteklenen diğer iki dil) için desteklenen geliştirme ortamıdır. Her ikisi de nesne yönelimli metin tabanlı programlama dilleridir. Visual Studio Code yüklemesi ve yapılandırması dahil FRC için C ++ veya Java kullanmaya başlama kılavuzu şu adresten bulunabilir here.
NI LabVIEW Tarafından Desteklenen FRC Sürücü İstasyonu (Yalnızca Windows)
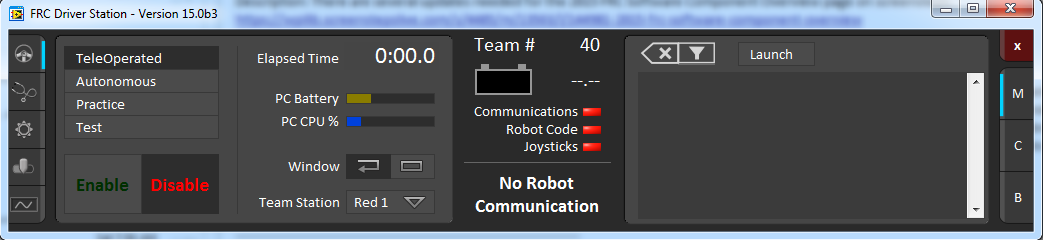
Yarışma sırasında robotun durumunu kontrol etmek amacıyla kullanılmasına izin verilen tek yazılım budur. Bu yazılım, robotunuza çeşitli giriş cihazlarından veri gönderir. Ayrıca, robot sorunlarını gidermeye yardımcı olmak için kullanılan bir dizi araç içerir. NI LabVIEW Tarafından Desteklenen FRC Sürücü İstasyonu hakkında daha fazla bilgi bulunabilir here.
Gösterge Tablosu Seçenekleri
LabVIEW Dashboard (Yalnızca Windows)
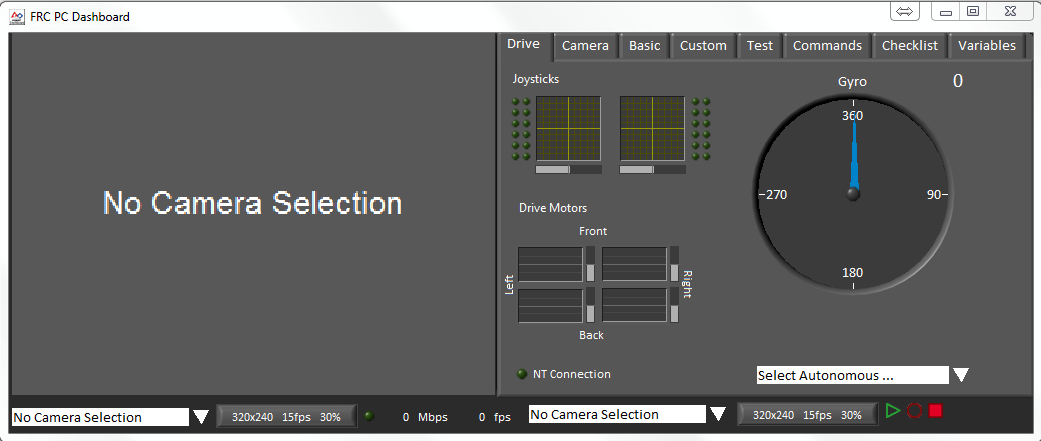
LabVIEW Kontrol Paneli, varsayılan olarak FRC Sürücü İstasyonu tarafından otomatik olarak başlatılır. Dashboard'un amacı, çeşitli yerleşik özelliklere sahip sekmeli ekranı kullanarak robotun çalışması hakkında geri bildirim sağlamaktır. FRC Default Dashboard yazılımı hakkında daha fazla bilgiyi burada bulabilirsiniz.
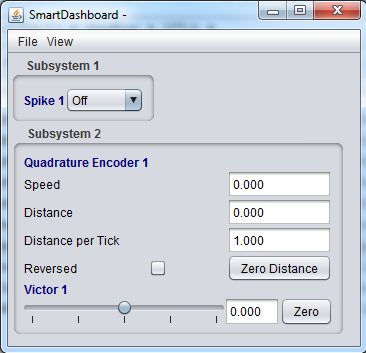
Akıllı Gösterge Paneli
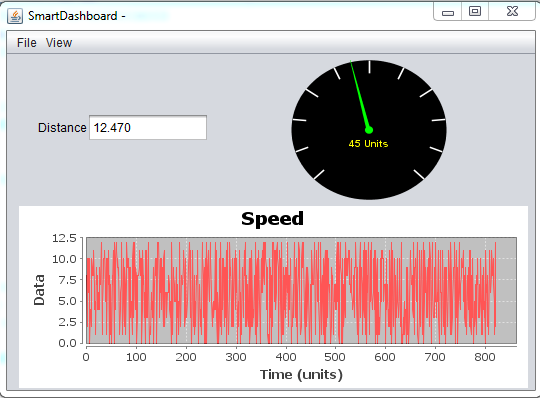
SmartDashboard, robotunuzdan gönderilen her bir veri parçası için özel olarak özelleştirilebilir göstergeler oluşturarak robot verilerinizi görüntülemenizi sağlar. SmartDashboard ile ilgili ek belgelere buradan ulaşabilirsiniz.
Shuffleboard (Karıştırma Tahtası)
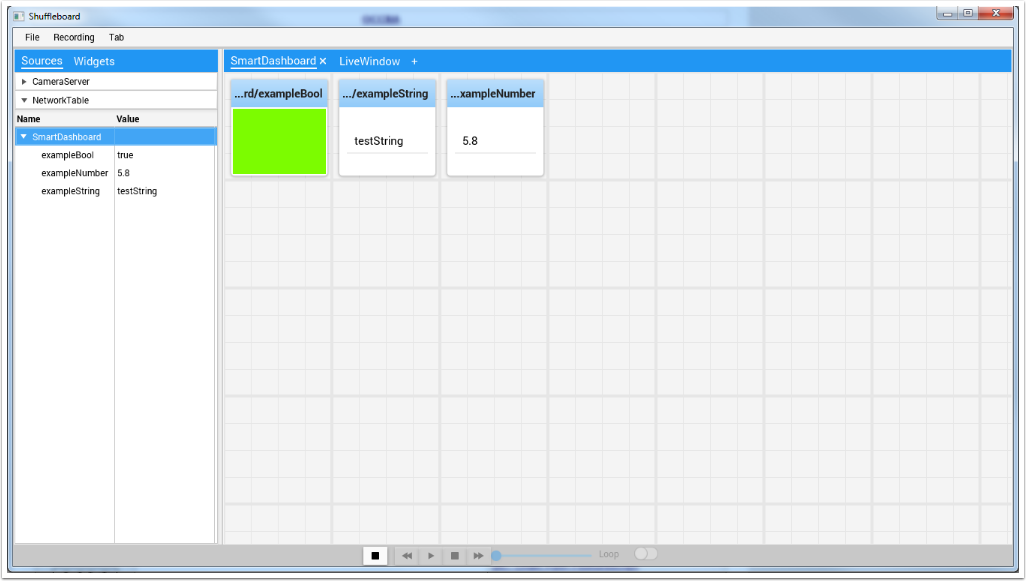
Shuffleboard, SmartDashboard ile aynı özelliklere sahiptir. Ayrıca, kaynak açısından daha az verimli olma pahasına yeni özellikler ve modern bir tasarımla verilerinizin kurulumunu ve görselleştirilmesini geliştirir. Shuffleboard ile ilgili ek belgelere buradan ulaşabilirsiniz.
Cam
Canlı Pencere
LiveWindow, SmartDashboard ve Shuffleboard'un bir özelliğidir ve Driver Station'ın Test Modu ile kullanılmak üzere tasarlanmıştır. LiveWindow, kullanıcının robot üzerindeki sensörlerden gelen geri bildirimleri görmesine ve yazılı kullanıcı kodundan bağımsız olarak aktüatörleri kontrol etmesine olanak tanır. LiveWindow hakkında daha fazla bilgiyi burada bulabilirsiniz.
FRC roboRIO Imaging Tool (Yalnızca Windows)
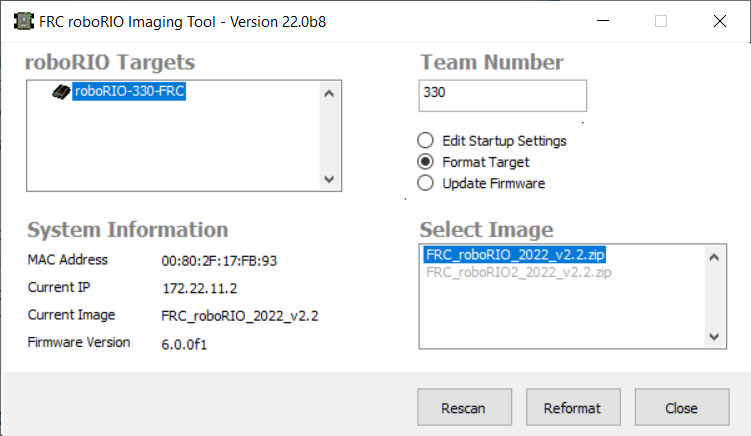
Bu araç, FRC’de kullanılmak üzere bir roboRIO’yu biçimlendirmek ve ayarlamak için kullanılır. Kurulum talimatları bulunabilir here. Bu aracı kullanarak roboRIO’nuzu görüntüleme hakkında ek talimatlar bulunabilir here.
FRC Radyo Yapılandırma Yardımcı Programı (Yalnızca Windows)
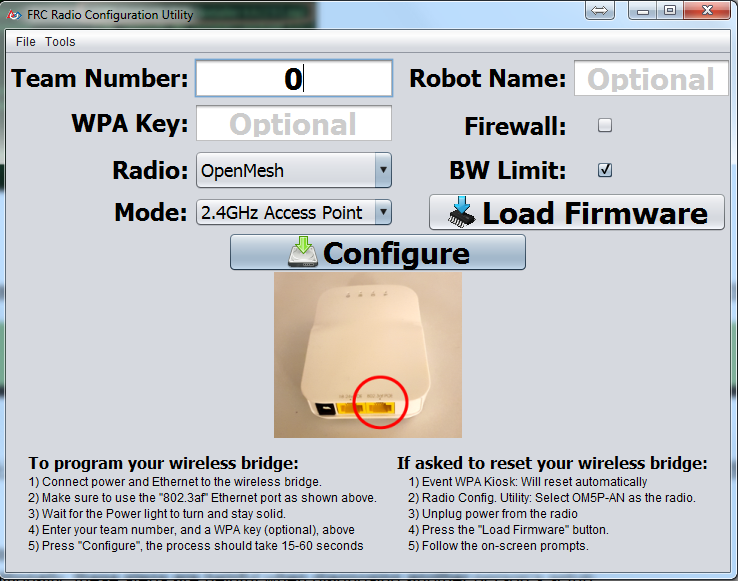
FRC Radyo Yapılandırma Yardımcı Programı, standart modemi evde pratik kullanım için yapılandırmak için kullanılan bir araçtır. Bu araç, FRC oyun alanı deneyimini taklit etmek için uygun ağ ayarlarını ayarlar. FRC Radyo Yapılandırma Yardımcı Programı, bulunabilen bağımsız bir yükleyici tarafından yüklenir here.
FRC Driver Station Günlük Görüntüleyicisi (Yalnızca Windows)
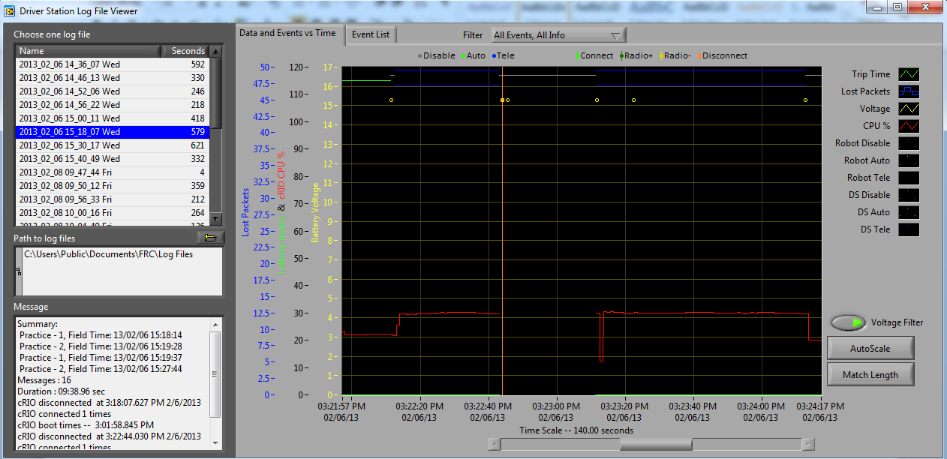
FRC Driver Station Günlük Görüntüleyicisi, FRC Driver Station tarafından oluşturulan günlükleri görüntülemek için kullanılır. Bu günlükler, bir antrenman seansı veya FRC maçı sırasında ne olduğunu anlamak için önemli çeşitli bilgiler içerir. FRC Sürücü İstasyonu Günlük Görüntüleyicisi hakkında daha fazla bilgi ve günlükleri anlamak şu adreste bulunabilir burada .
RobotBuilder
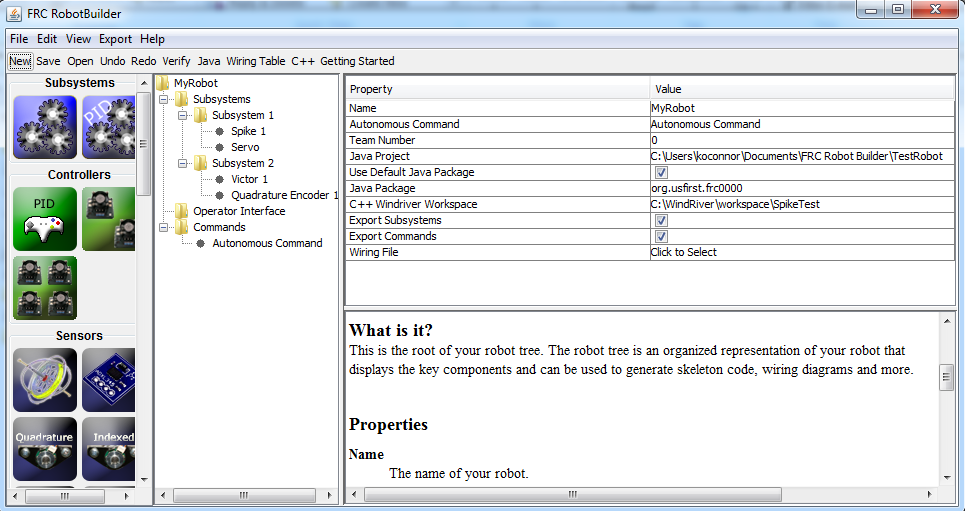
RobotBuilder, C++ veya Java için Komut Tabanlı bir robot projesinin kurulumuna ve yapılandırılmasına yardımcı olmak için tasarlanmış bir araçtır. RobotBuilder, robot alt sistemlerinizin ve operatör arayüzünüzün çeşitli bileşenlerine girmenize ve komutlarınızın ne olduğunu grafiksel bir ağaç yapısında tanımlamanıza olanak tanır. RobotBuilder, başlamanız için yapısal şablon kodu oluşturacaktır. RobotBuilder hakkında daha fazla bilgi bulunabilir here . Komut Tabanlı programlama mimarisi hakkında daha fazla bilgi bulunabilir here .
Robot Simülasyonu
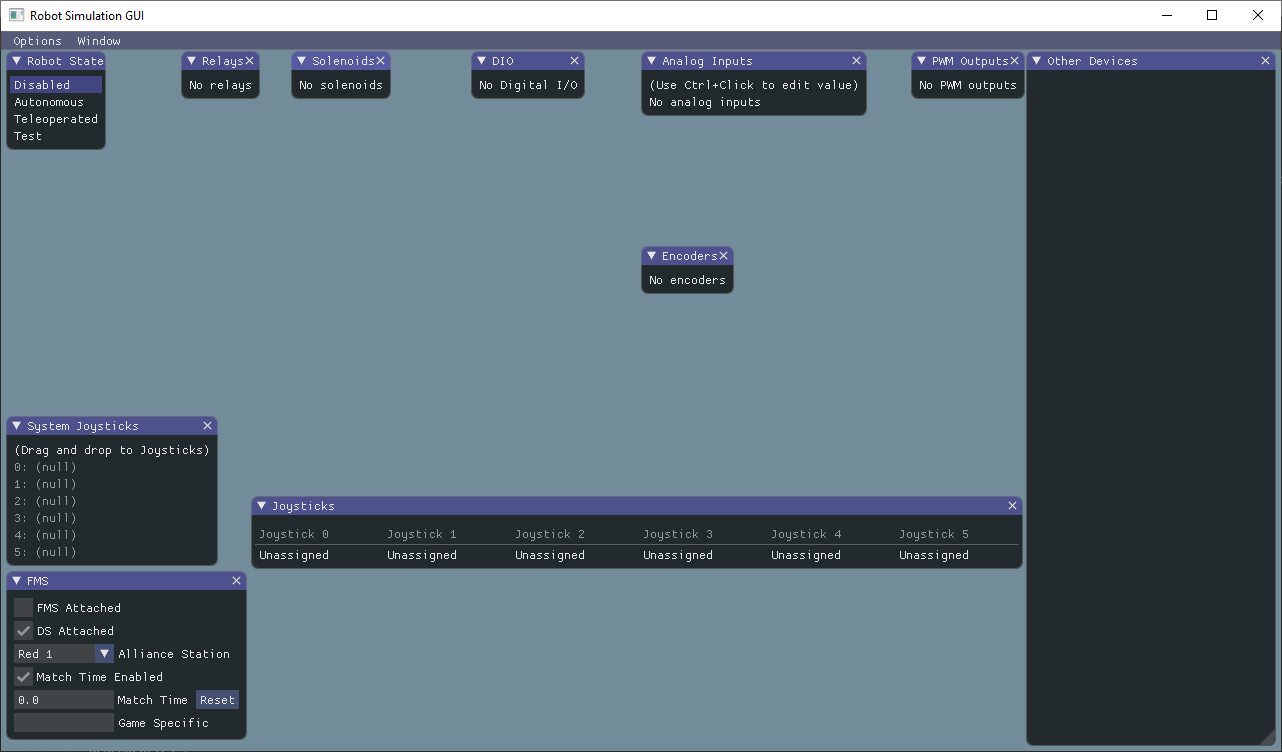
FRC LabVIEW Robot Simülatörü (Yalnızca Windows)
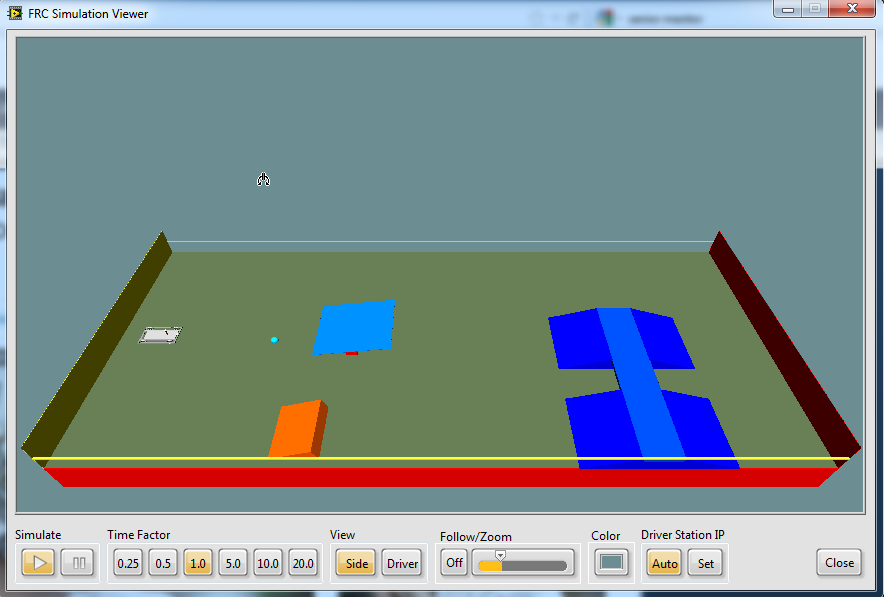
FRC Robot Simülatörü, kodu ve / veya Sürücü İstasyonu işlevlerini test etmek için simüle edilmiş bir ortamda önceden tanımlanmış bir robotu çalıştırmanıza olanak tanıyan LabVIEW programlama ortamının bir bileşenidir. FRC Robot Simülatörünün kullanımına ilişkin bilgiler burada veya LabVIEW Project Explorer’da Robot Simulation Readme.html dosyasını açarak bulunabilir.
PathWeaver
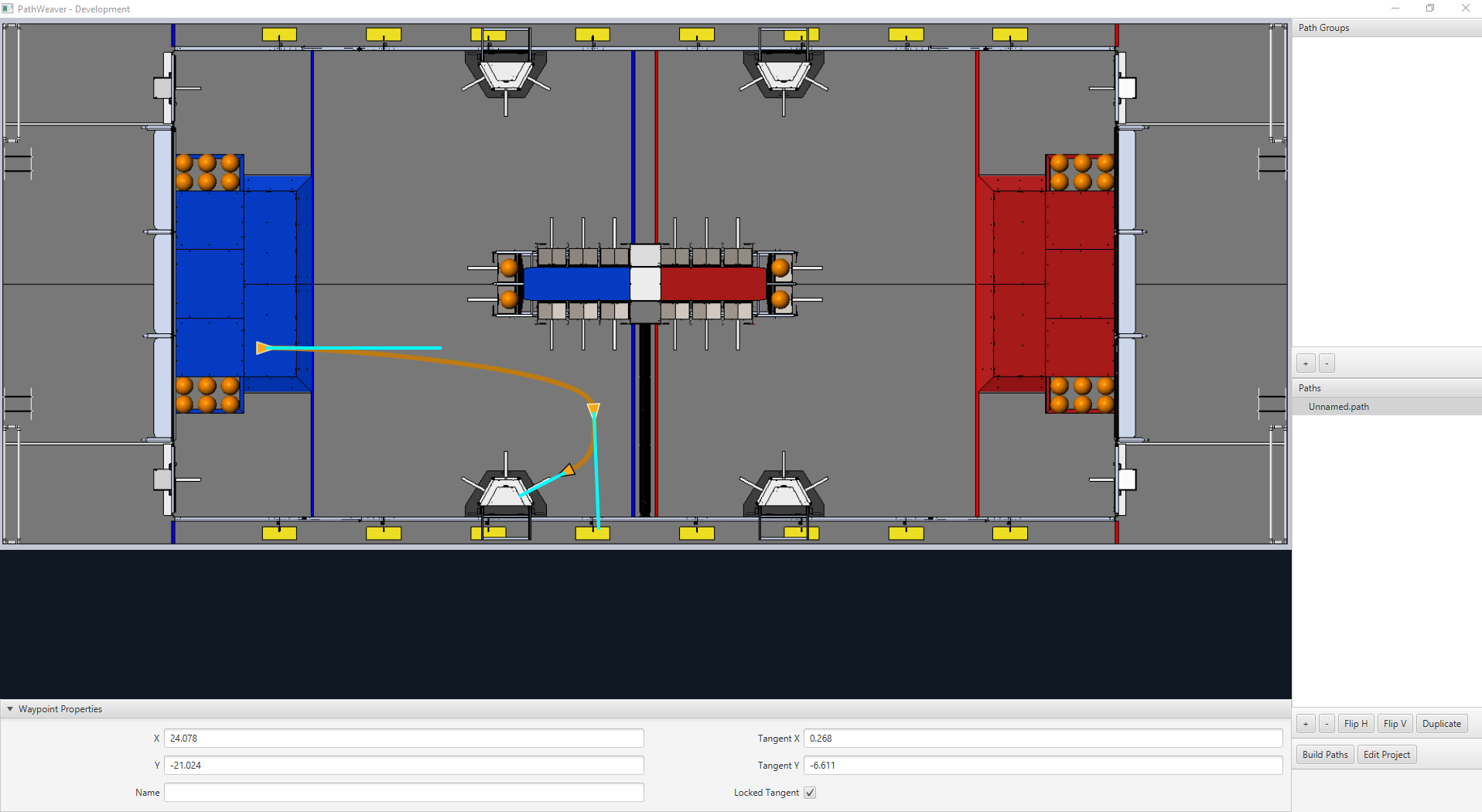
PathWeaver, ekiplerin gelişmiş otonom rutinler için yolları hızlı bir şekilde oluşturmasına ve yapılandırmasına olanak tanır. Bu yollar, ekibin robotlarını sahadaki noktalar arasında hızlı bir şekilde yönlendirmesine olanak tanıyan düzgün eğrilere sahiptir. Daha fazla bilgi için PathWeaver bölümüne bakın.
Sistem Tanımlama

Bu araç, ekiplerin robot simülasyonu, yörünge takibi ve PID kontrolü gibi özelliklerde kullanılmak üzere robotunuzun fiziksel özelliklerini tanımlamak için kullanılabilecek sabitleri otomatik olarak hesaplamasına yardımcı olur. Daha fazla bilgi için Sistem Kimliği bölümüne bakın.
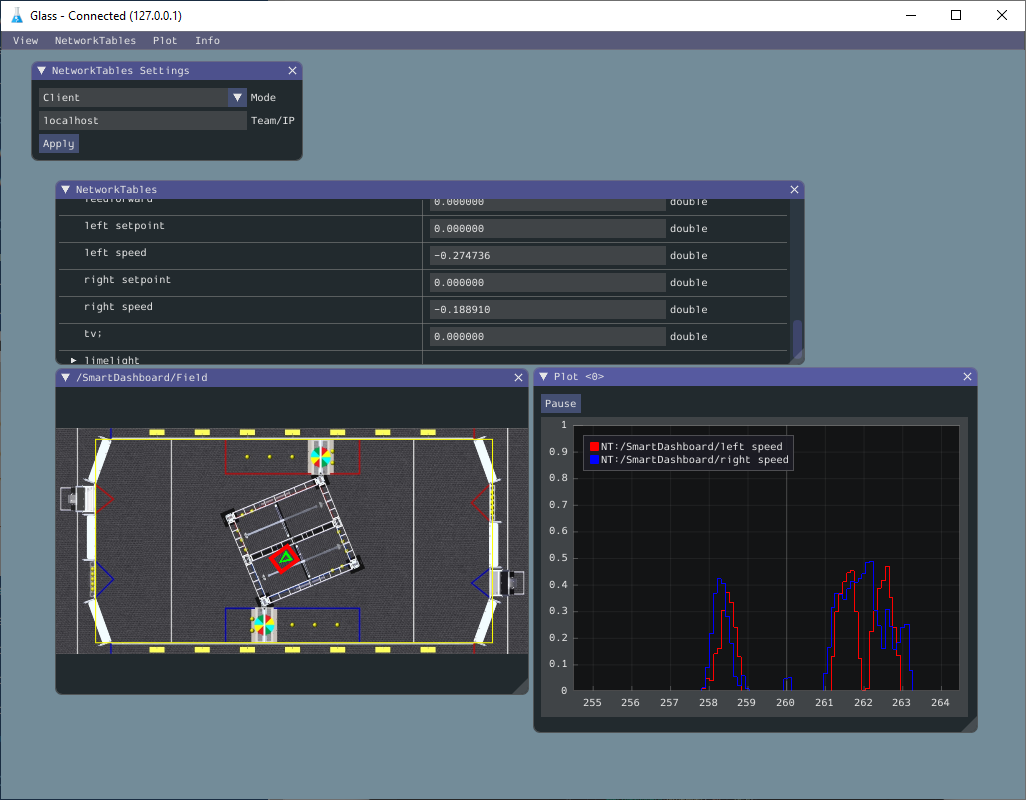
Anahat Görüntüleyici
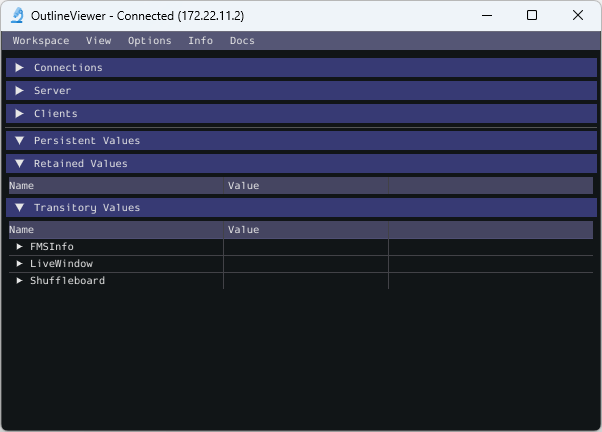
OutlineViewer, hata ayıklama amacıyla NetworkTables'ın tüm içeriğini görüntülemek, değiştirmek ve eklemek için kullanılan bir yardımcı programdır. LabVIEW ekipleri, bu işlevi gerçekleştirmek için LabVIEW Panosunun Değişkenler sekmesini kullanabilir. Daha fazla bilgi için Anahat Görüntüleyici bölümüne bakın.
Bizim Sponsorlarımız